|
|
Humanoid Project
NR-TWO
ジャンプに挑戦編 |
|
1.Freedomでジャンプに挑戦(2001.12.16) 2.Freedomでボールをキック(2002.01.08) 3.上体のパワーが重要(2002.01.12) 4.NR-two完成(2002.02.11) 5.ロケットの調査(2002.03.26) 6,ジャンプのシミュレーション(2002.04.14) 7.ロケットエンジン推進力テスト(2002.04.15) 8.ロケットエンジン搭載(2002.04.21) 9.打ち上げ失敗(2002.05.05) 10.2度目の打ち上げ(2002.05.18) 12.NR-2のまとめ(2003.01.12) |
ジャンプロボットを作るにあたって、まずFreedomでジャンプの関節パターンを作成してみました。飛べません。やはりモータのトルクを大幅に上げなくてはなりません。まずはジャンプの目標を50cmとおくことにします。これ以上のジャンプは他のエネルギーに頼ることにすべきでしょう。鉄腕アトムのようにロケットエンジン?でも搭載しなければならないのだろうか。
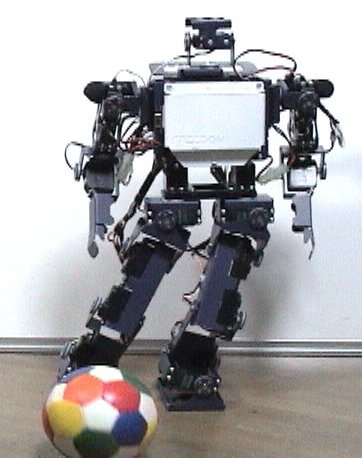
FreedomのJump 足先の部分も伸ばしているつもりなのに全くトルクがありません。このトルクが必要そうです。 ジャンプ用駆動系の良いアイデアがなかなか出てこないのでボールをキックさせてみよう。ROBO-CUPにはでることができそうだ。
ボールをキック ジャンプするには上体のパワーが重要だとのコメントを頂きました。Freedomの上体にサーボを追加してやればもう少しジャンプできるかも知れません。駆動系の新しいアイデアができるまではFreedomの改良でもう少しテストしておくことにします。早速サーボの配置を検討しました。サーボをスマートに胴体に入れるのは大変です。
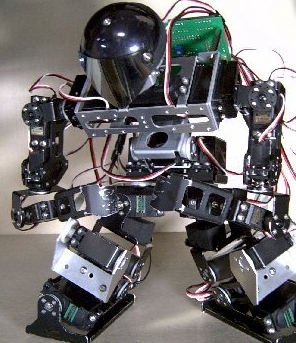
上体のサーボ配置の検討図 (2001.1.26)上体に2軸追加しました。ついでは頭も作りました。
上体の動きを追加することにより、数ミリジャンプ出来そうです。しかし、ジャンプ方向が安定しません。各関節へのサーボ負荷が異なることから、重心の移動方向が不安定になっているようです。
上体の自由度が増えるといろいろな動作が行えます。まずは上体付きのジャンプです。
上体をつけてJump(2002.02.11) 次にジャブを出してみました。
ジャブを打つ。 空手チョップも出来ます。
チョップ。
もちろん歩くことも出来ます。
歩く。
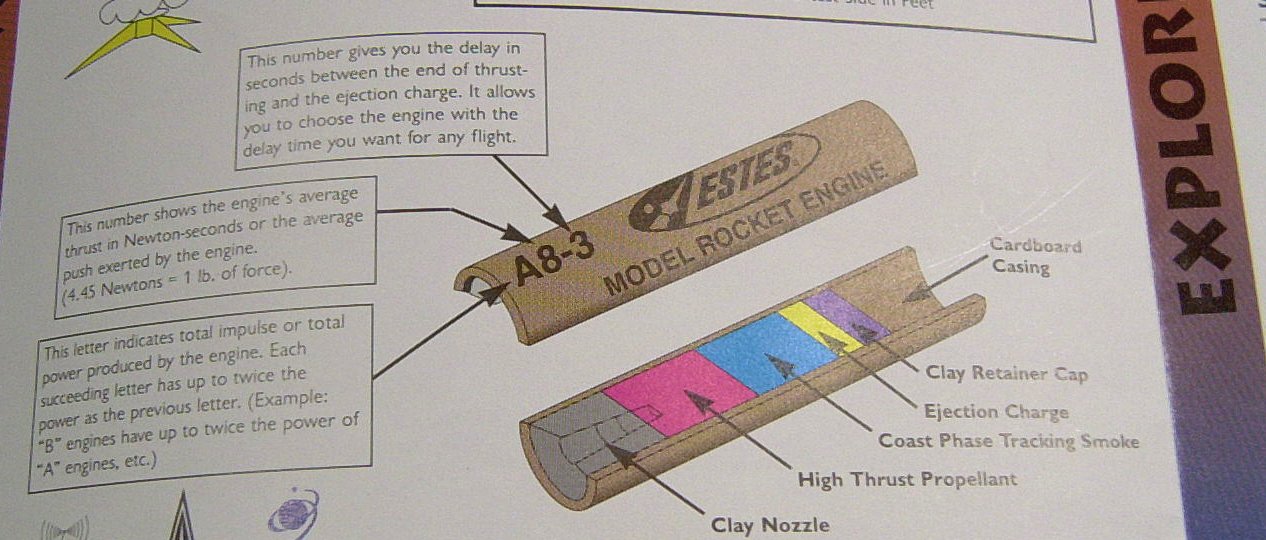
ロケットがやってきました。ロケットには興味はないのですがとりあえず写真だけは撮っておきました。ESTES社のものです。
ロケットエンジンの構造がよく出来ています。最初高いスラストを出すための火薬が仕込まれています。
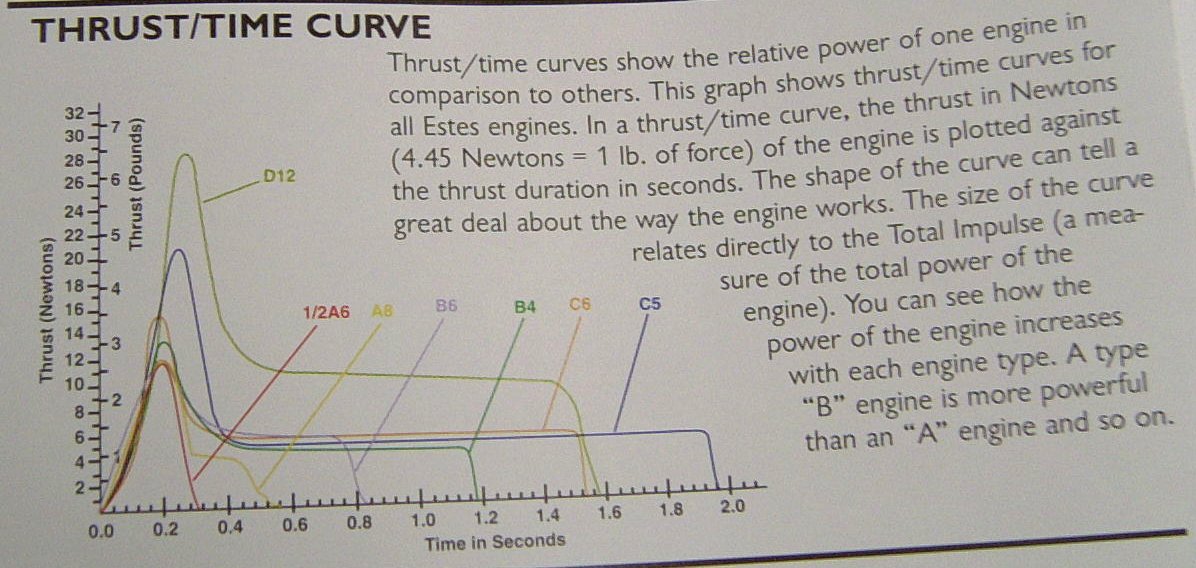
スラストカーブは以下のとおりです。今回入手したエンジンはC5です。最初に約20Nのスラストが得られます。NR-twoは2.4Kgですから2個のエンジンを付ければ飛び上がれるはずです。
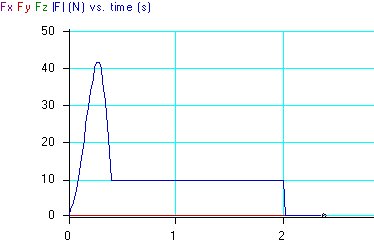
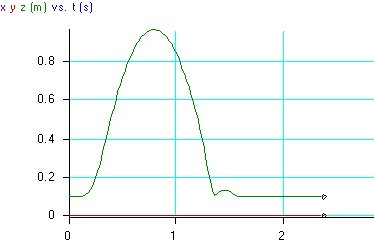
早速簡易なシミュレーションをVisualNastran4Dを使ってやってみました。下図はシミュレーションに使用したスラストカーブです。
これにジャンプ動作による力を最大スラスト時を同期させるようにして与えました。 この結果によると1m近くジャンプすることが可能です。エンジンを4個つけると6mのジャンプも可能であることが分かりました。しかしこの場合はエンジンの約2秒の噴射が着地までに終わってしまうので、逆噴射しながらの着地が必要であることも分かりました。エンジンは一台2200円ですから、シミュレーションをしっかりやってから実際のジャンプに入ります。資金が厳しいのでH2ロケットのように失敗は出来ません。
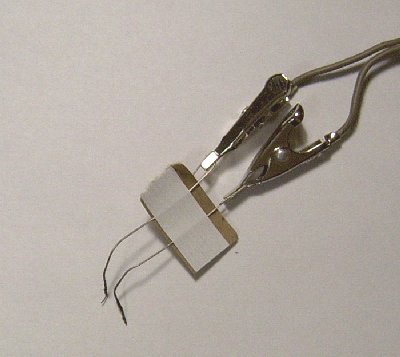
ロケットエンジンの推進力のテストを多摩川ロケット打ち上げ基地において行いました。
これはエンジン点火スイッチです。本来スイッチは予備電流をながしておいて点火する回路となっていますが、ロボットにおいては無駄に電流を流したくないので電圧を上げ、瞬時に点火できるような回路に改造しました。
写真は点火後のヒューズです。焼ききれた部分が発熱し、火薬に点火します。
エンジン点火
初めてでもあり、緊張の一瞬でした。ビデオがぶれてしまいました。スイッチオンと同時に噴射です。 いよいよロケットエンジン搭載の準備です。ウイングとエンジンマウントを作りました。ロケットエンジンの試験結果から火炎の広がりを調査し、この結果より、ロケットエンジンの位置を決定しました。当初腕に付けることを検討していましたが、腕のサーボのトルクや応答性が心配です。今回はロケットに対する重心を移動することによって方向を変えることにトライして見たいと思います。
片側4機のロケットエンジンが搭載できるようにしました。下の写真は1機用のエンジンマウントです。2機用はまだ作っていませんが、これを前後につけることで4機まで搭載可能です。高く飛ぶためには多くのロケットエンジンが必要です。着地のタイミング速度を落とすために逆噴射が必要です。
何回か模擬実験の後打ち上げということになります。 連休に入ったのでいよいよロケットジャンプです。足のあたりにふらふらしている配線がロケットの火炎で燃えないように整理しました。
ロケット点火回路を作成。誤動作しないように回路にもプログラムにも工夫が必要です。アイアンイーグルでエアーバックを使ったときの経験が生きています。ロケットは数10msecの電流で点火してしまうのです。また点火のタイミングも非常に重要です。エンジンテストの結果と、ジャンプのビデオを重ね合わせながら点火のタイミングを設定しました。 いよいよ多摩川ロケット打ち上げ基地でロケットジャンプです。
打ち上げ失敗です。片側のロケットに点火しませんでした。片側だけでもロボットが浮いているような気がします。 原因は点火プラグの挿入ミスでした。また点火のタイミングが50msecばかり遅いこともわかりました。やはりビデオを眺めたり、検討をいくらやっても駄目です。実践が先生です。人為的なミスをどう対応するかも、このような一発勝負ロボットの場合大切です。いい勉強になりました。 久々の晴れの日曜日、多摩川ロケット打ち上げ基地でロケットジャンプです。両ロケットともに噴射、タイミングもバッチリでしたが、チョット前傾姿勢過ぎました。路面が不安定なのでジャンプ姿勢が安定しません。
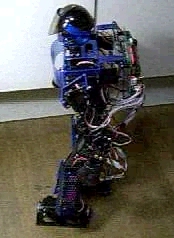
ロケットを購入し、台風の去るのを待っていました。いつの間にか多摩川ロケット打ち上げ基地は草の丈が伸びていました。 ロケットを4個にパワーアップしました。もう制御もなにもありません。カメラも追うことができません。
3m以上飛んで行きました。これでもまだNR2は生きています。胸と膝のプロテクターは非常に効果があります。今度は真っ直ぐ上にジャンプして見ることにします。 1. 動歩行 そこで今後は、これらの経験をもとにジェットエンジン搭載ロボットに移行することとした。 |